
Controller Area Network (CAN) je dátová komunikačná sieť pre distribuované riadiace aplikácie pracujúce v reálnom čase. CAN bol navrhnutý koncom 80. rokov firmou Bosch a jeho pôvodným určením bola úspora kabeláže a zabezpečenie komunikácie medzi snímacími, riadiacimi a výkonovými prvkami v automobiloch. Vďaka vlastnostiam (vysokej rýchlosti prenosu, vysokej spoľahlivosti, odolnosti voči rušeniu, širokému rozsahu pracovných teplôt, definovanému času prístupu na zbernicu pri prenose dôležitých správ, nízkej cene komunikačných obvodov) sa CAN veľmi rýchlo presadil aj v ďalších oblastiach. Popri priemyselných riadiacich systémoch našiel CAN uplatnenie aj v zdravotníckej technike, riadiacej elektronike budov, robotických systémoch, dopravných systémoch, poľnohospodárskych strojoch, atď.
Fyzikálna vrstva CAN, realizovaná v našich produktoch, je definovaná normou ISO/DIS 11898. Prenosovým médiom je krútený pár vodičov s impedanciou 120 ohmov. Tieto vodiče sa označujú CAN_H a CAN_L. Rovnako sa označujú aj pripojovacie body komunikujúcich uzlov. Toto rozhranie umožňuje komunikačné rýchlosti až do 1 Mbit/s. Maximálna komunikačná rýchlosť je závislá na celkovej dĺžke zbernice. Pre rýchlosť 1 Mbit/s je maximálna dĺžka zbernice 40m, pre 500kbit/s 130m, pre 125 kbit/s 530m, pre 20 kbit/s 3.3 km. Maximálny počet uzlov na jednej zbernici je 64. V koncových uzloch zbernice sa medzi vodiče CAN_H a CAN_L pripájajú zakončovacie odpory 120 ohmov.
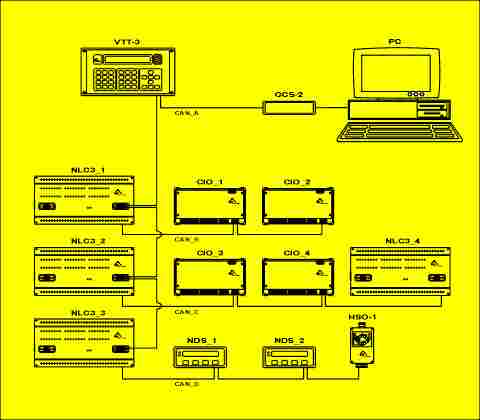
Príklad štruktúry distribuovaného riadiaceho systému s komponentmi prepojenými cez CAN je na obrázku. Riadiaci systém pozostáva z nasledovných typov komponentov:
- vizualizačného PC vybavených
interfejsovým modulom GCS-2
- inteligentného technologického terminálu VTT-3
- programovateľných automatov NLC-3
- rozširujúcich vstupno/výstupných modulov CIO
- procesných prístrojov NDS a vážiaceho prevodníka HSO-1.
Všetky prvky sú vybavené rozhraním CAN, niektoré NLC-3 majú tieto rozhrania dva. Riadiacim prvkom pre CIO moduly môžu byť automaty NLC-3 alebo terminály VTT.
V systéme na obrázku sú 4 zbernice CAN - CAN_A, CAN_B, CAN_C a CAN_D. Vodorovne nakreslené zbernice CAN_B, CAN_C a CAN_D integrujú komponenty, ktoré môžu riadiť napríklad priestorovo alebo funkčne definované celky. Zvislo nakreslená zbernica CAN_A sprostredkuje spojenie riadiacich automatov jednotlivých celkov s vizualizačmými a monitorovacími systémami realizovamými v PC a VTT-3.
Počet prvkov v systéme, pokiaľ by nebola rozhodujúca celková dĺžka zbernice, umožňuje napríklad aj takú topológiu, pri ktorej by boli všetky prvky pripojené na jednu zbernicu CAN. V takom prípade je potrebné uvažovať popri počte uzlov, ktoré vyplýva z definície fyzikálneho rozhrania (64) aj o prenosovom zaťažení siete. Pri komunikačnej rýchlosti 100 kbit/s je systémové zaťaženie cca 3% na uzol. Predpokladané systémové zaťaženie siete by nemalo prekročiť 50%, aby bol dostatok priestoru na prenos nesystémových, t.j. v užívateľskom programe generovaných správ.
V prípade potreby zvýšenia prenosovej kapacity siete je možné buď zvýšiť prenosovú rýchlosť CAN zbernice ( pri 1 MBit/s je zaťaženie cca 0.3% na uzol), alebo ju rozdeliť na viacero segmentov tak, aby sa k jednotlivým komponentom dostávali len tie informácie, ktoré sa vzťahujú k nimi riešenej úlohe. Pri rozsiahlejších systémoch je vhodnejšie druhé riešenie, ktoré popri uvoľnení prenosovej kapacity zároveň znižuje aj zaťaženie jednotlivých procesorov komunikačnými úlohami.
![]()